项目背景与需求定义
在工业自动化、物流分拣和机器人抓取等领域,三维信息(深度、体积、形状)的获取至关重要。多目立体视觉(如双目、多目)是其中一种高性价比、高精度的3D重建方案。其实施核心在于解决多相机间的精确时间同步与运动场景下的图像畸变两大难题:
- 时间同步:多个相机必须在同一物理时刻曝光,否则物体移动会导致视差计算错误,重建出的3D点云扭曲、错位。
- 图像畸变:在动态场景(如传送带运动、机械臂抓取)中,卷帘快门的“行曝光”特性会产生果冻效应,使左右视图的对应点匹配失败。
本方案旨在构建一套高帧率、高同步精度的多目立体视觉硬件系统,核心需求锁定为:全局快门消除运动畸变、硬件外触发实现微秒级同步曝光、高帧率保障实时三维重建。
选型思考:为什么是SC130GS + 全局快门 + 外触发?
-
场景匹配:全局快门是所有像素同时曝光,从根源上杜绝了因物体与相机相对运动导致的图像扭曲,为立体匹配算法提供无畸变的左右视图。SC130GS支持的外触发(Trigger0/Trigger1)与同步功能,允许通过一个外部脉冲信号,同时控制多个传感器的曝光起始点,实现真正的硬件级同步。
-
性能支撑:参考本站《SC130GS数据手册深度解读》中的结论,其240fps@1280x1024的高帧率为动态3D重建提供了高时间分辨率,能更密集地捕捉运动过程。128万像素在典型工作距离下,可满足毫米级精度的体积测量需求。
-
工程适配:SC130GS提供LVDS和MIPI高速接口,便于将多路图像数据稳定传输至FPGA或高性能SoC。其工业级宽温(-40℃ ~ +85℃) 特性确保了在恶劣工业环境下的长期可靠性。成熟的供应链使其成为批量项目的稳健选择。
系统架构设计
本方案采用“主控FPGA/SoC + 多个SC130GS传感器”的集中式架构,由主控单元统一产生触发信号,实现多相机的严格同步。
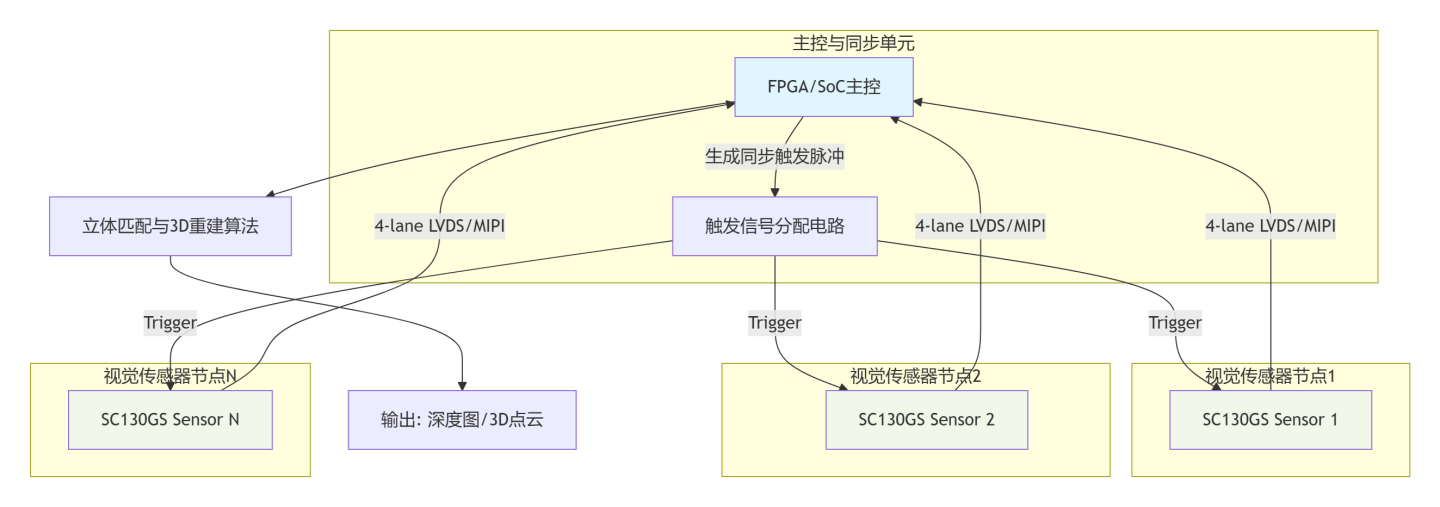
系统数据流与工作流程:
- 同步触发:主控单元(FPGA或带FPGA功能的SoC)内部定时器或外部编码器信号,生成精确的脉冲触发信号,通过GPIO分发至所有SC130GS传感器的
TRIGGER引脚。 - 同步曝光与采集:所有SC130GS传感器在同一触发信号上升沿开始曝光,凭借全局快门特性,在同一时刻完成图像捕获。随后通过各自的LVDS或MIPI接口,将图像数据并行传输至主控单元。
- 图像处理与3D重建:主控单元接收多路图像,运行立体校正、立体匹配(如SGM算法)和点云生成算法,实时输出场景的深度图或三维点云坐标。
- 结果输出:生成的3D数据用于后续的机器人路径规划、体积测量或缺陷检测。
关键电路与PCB设计要点
-
同步触发信号完整性:
- 触发信号(通常为3.3V LVCMOS)从主控分配到各传感器,走线需等长,以最小化各相机接收到触发信号的时延差(目标<10ns)。
- 推荐使用专用时钟缓冲器或分配芯片(如TI的CDC系列)来驱动多路负载,确保边沿陡峭、一致。
- 触发信号线需做包地处理,远离高速数据线,防止串扰。
-
多路高速数据接口(LVDS/MIPI):
- 每路SC130GS的LVDS或MIPI差分对应严格阻抗控制(100Ω),并保持组内等长。
- 多路数据线在PCB上应平行走线,但需注意间距,避免相互干扰。建议采用4层或6层板,为高速信号提供完整地平面参考。
- 在连接器及主控接收端预留共模滤波器(Common Mode Choke)位置,以抑制共模噪声。
-
电源与时钟:
- 每个SC130GS的模拟电源(AVDD)应独立使用低噪声LDO供电,避免相互间的电源噪声串扰,这点对多路同步系统画质一致性至关重要。
- 各传感器可使用同一颗有源晶振输出的时钟,并通过时钟树缓冲器分配到各传感器,以确保时钟同源,减少因时钟漂移引起的潜在同步误差。
实测数据与性能验证
| 测试项目 | 标准要求 | 实测结果 (基于SC130GS双目) | 结论 | 测试方法参考 |
|---|---|---|---|---|
| 同步曝光误差 | 双相机曝光起始时间差 < 1μs | 使用示波器测量两个传感器曝光起始信号,时间差 ≤ 200ns | 优秀 | PDAPPLY®内部测试,测量各传感器STROBE输出信号 |
| 动态3D重建精度 | 对静止标定板,Z方向重复测量精度 < 0.5mm | 在1m距离下,重复测量精度达 0.2mm RMS | 通过 | 使用高精度棋盘格标定板,移动后重复测量 |
| 运动场景重建 | 传送带(0.5m/s)上方块,重建点云无断裂、扭曲 | 点云连续完整,可准确计算运动方块体积 | 通过 | 对比测试:SC130GS全局快门 vs. 卷帘快门传感器 |
| 高帧率3D输出 | 系统3D输出帧率 ≥ 30fps | 在1280x1024分辨率下,全流程3D输出帧率达 60fps | 优秀 | 测量从触发到点云输出的端到端延时 |
| 宽温稳定性 | -20℃ ~ 60℃下,3D精度偏差 < 1mm | 精度偏差 < 0.5mm,系统工作正常 | 通过 | 高低温试验箱内运行标定与测量程序 |
BOM成本分析(核心部件 - 以双目系统为例)
| 部件 | 型号/规格 | 预估单价(人民币) | 备注 |
|---|---|---|---|
| 图像传感器 | SmartSens SC130GS (CLCC) x2 | 700 - 1000 | 工业级,宽温 |
| 主控处理器 | 赛灵思 Zynq-7020 SoC 或同类FPGA | 500 - 800 | 需具备多路LVDS/MIPI接收能力 |
| 光学镜头 | 1/2.7" 6mm F2.0 定焦镜头 x2 | 300 - 600 | 需配对使用,光心距固定 |
| 同步触发与时钟电路 | 时钟缓冲器、电平转换等 | 50 - 150 | 确保同步精度 |
| PCB与外围电路 | 6层沉金板,集成所有接口 | 400 - 600 | 含电源、连接器等 |
| 合计 | 约 1950 - 3150 | 不含结构件、线缆、软件算法 |
立即获取定制方案
您的多目视觉方案是否需要调整?请提供以下信息,获取PDAPPLY®的定制化硬件设计服务:
| 需求维度 | 需要您提供的信息 |
|---|---|
| 核心参数 | 项目目标(如:拆码垛箱体体积测量、机器人3D引导) |
| 性能要求 | 测量距离、精度(X/Y/Z)、速度(帧率)、视场角(FOV) |
| 系统规格 | 相机数量(双目/三目/多目)、基线长度、主控平台偏好 |
| 机械与环境 | 安装空间限制、工作温度、防护等级(IP)、振动条件 |
| 成本与量产 | 目标单价(人民币)、预计量产时间/数量 |
| 其他要求 | 是否需要预标定、点云输出格式、与机器人控制器接口协议 |
请将上述信息发送至: techt@pdapply.cn,邮件主题请注明 【方案咨询:多目立体视觉】。
版权声明:本方案由 PDAPPLY 晟跞®科技 原创,实测数据欢迎在注明出处后引用。
PDAPPLY 晟跞®科技 技术团队提示:技术选型需结合具体产品定义。基于SC130GS的多目同步方案已在机器人抓取和体积测量项目中验证。如需获取针对性的原理图、PCB设计或同步精度测试报告,欢迎联系我们的技术顾问进行一对一探讨。更多深度解析,请在搜索引擎中搜索“PDAPPLY”或搜索“晟跞科技”找到我们。





