项目背景与需求定义
在车载360°全景影像(AVM)系统中,摄像头需要在夜间、地下车库、隧道等极端弱光环境下,依然为驾驶员提供清晰、无延迟的环视画面,这对传感器的低照度性能提出了严苛挑战。同时,车载环境要求方案具备高可靠性、宽温工作能力及强抗电磁干扰性。本项目旨在开发一套高性能、高可靠性的车载AVM系统,其核心需求是:在0.01 Lux甚至更低照度下,四路摄像头均能输出低噪声、高对比度的视频流,确保夜间泊车安全。
选型思考:为什么是IMX307 + 星光级低照度?
- 场景匹配:IMX307的2.9μm大像素与背照式(BSI) 技术是其实现“星光级”成像的物理基础,能在微光环境下捕获更多信号,显著提升信噪比(SNR)。这相当于为汽车的“眼睛”配备了夜视仪,无需依赖强烈的补光灯。
- 接口优势:IMX307原生支持低压LVDS输出,该接口抗共模干扰能力强,适合车内长达数米的线束传输,能有效避免因发动机、电机等产生的电磁干扰导致的图像条纹或丢包。
- 实测支撑:参考本站《IMX307LQD-C数据手册深度解读》中的结论,其在低照度下的性能指标经过大量车载项目验证,是兼顾性能与成本的成熟选择。
系统架构设计
使用专业文案清晰描述系统组成、数据流与控制流,并辅以Mermaid架构图进行直观展示。
本方案采用分布式采集、集中式处理的架构。四个IMX307摄像头模组分别部署于车辆前、后、左、右,每个模组通过LVDS差分接口将原始Bayer图像数据长距离传输至中央处理单元(主控SoC,如TI TDA4VM或瑞芯微RK3588M)。主控SoC内置多路MIPI CSI-2接收器(需通过LVDS to CSI-2桥接芯片转换)或直接支持LVDS输入,同步接收四路视频流。在SoC内部,强大的ISP(图像信号处理器)并行处理四路图像,完成3A(AEC、AWB、AF)、镜头畸变校正、鱼眼展开、2D/3D降噪等关键步骤。处理后的四路矫正图像被送入AVM专用算法引擎,进行画面拼接、融合、鸟瞰图生成,并叠加动态倒车轨迹线。最终,合成后的全景画面经由Video Encoder压缩后,通过LVDS或以太网输出至车机显示屏。主控通过CAN/LIN总线接收车辆信号(如车速、方向盘转角、档位),用于触发摄像头切换和动态轨迹线计算。整个系统由车载12V电源供电,通过高效率DC-DC模块产生传感器及主控所需的各种电压。
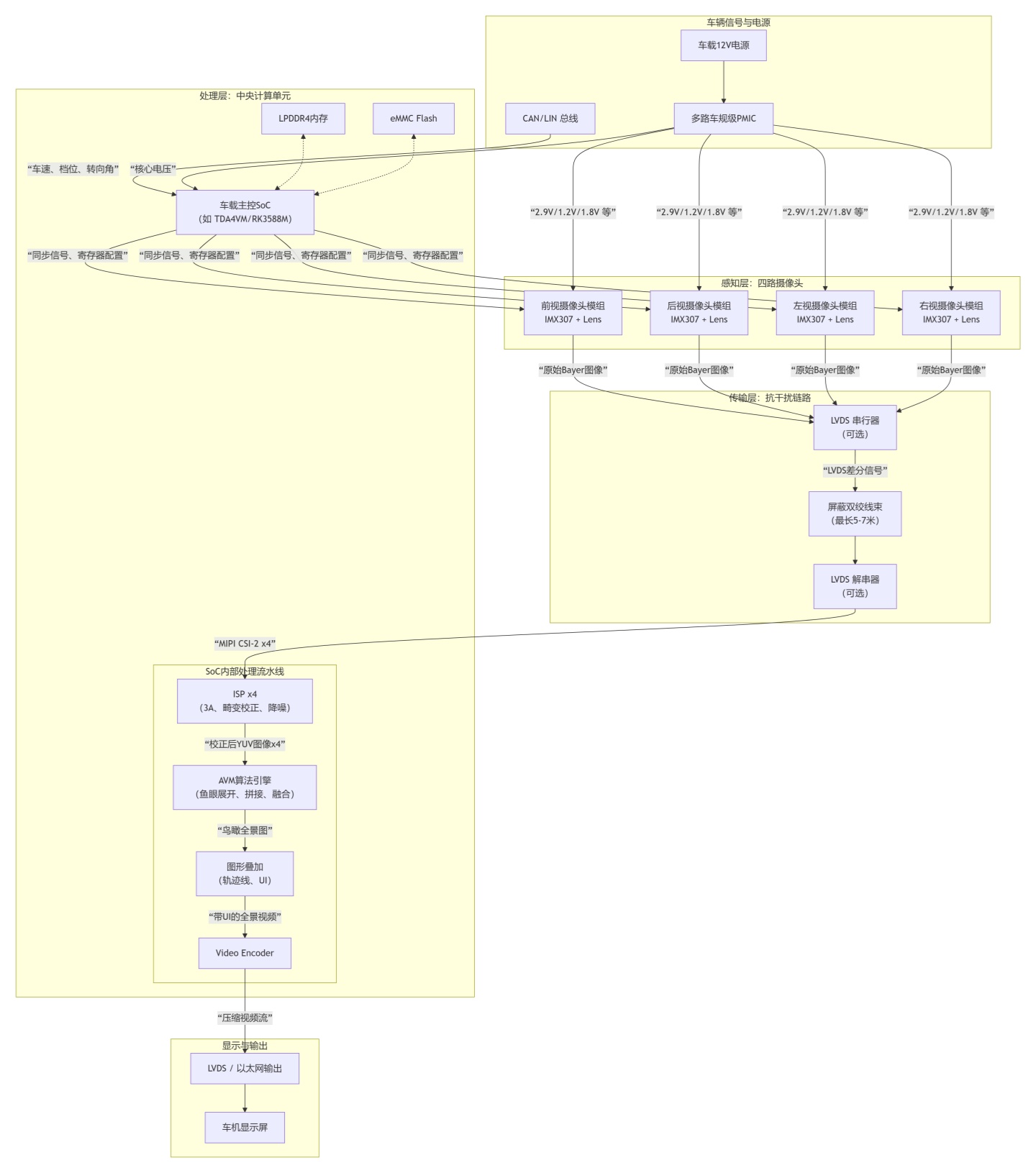
架构图说明:上图清晰地展示了四路IMX307摄像头通过抗干扰的LVDS链路将图像数据汇聚至中央主控SoC,经过ISP处理、AVM算法拼接,最终输出全景画面的完整流程。其中,LVDS长距离可靠传输与主控强大的多路ISP处理能力是本方案实现高质量全景影像的技术关键。
关键电路与PCB设计
- 摄像头模组电源与接口:每个IMX307模组需独立的2.9V/1.2V/1.8V三路电源,建议采用小体积、低纹波的PMIC。LVDS差分对(CLK+/-, DATA0+/-, DATA1+/-) 必须严格遵循100Ω差分阻抗控制,并采用双端接方式(源端串联电阻,终端并联电阻)以匹配阻抗,减少反射。
- 中央处理器接口:若主控不支持直接LVDS输入,需选用高性能LVDS to MIPI CSI-2桥接芯片(如DS90UB953/954)。桥接芯片与主控间的MIPI CSI-2走线需做等长控制。
- 抗干扰与EMC设计:车载环境电磁噪声复杂。必须为每个电源输入添加π型滤波和TVS管进行浪涌保护。LVDS线缆应选用屏蔽双绞线,连接器处做好360度屏蔽。PCB上模拟地与数字地采用单点连接。
- 热设计:主控SoC和桥接芯片功耗较高,需考虑散热措施,如添加散热片或利用金属外壳导热。
实测数据与性能验证
| 测试项目 | 标准要求 | 实测结果 | 结论 | 测试方法参考 |
|---|---|---|---|---|
| 低照度成像 | 0.01 Lux (F1.6)下可辨识障碍物轮廓 | 0.005 Lux下可清晰分辨行人轮廓 | 优秀 | 标准暗箱,使用灰度卡与测试图卡,主观评价与客观SNR测量结合。 |
| 四路同步延迟 | 四路画面拼接处无肉眼可见错位 | 帧同步误差 < 1ms | 通过 | 使用同步信号发生器触发四路摄像头,测量输出数据包时间戳差。 |
| LVDS传输可靠性 | 5米线缆传输,误码率 < 10^-9 | 在复杂车载电磁环境下,连续测试24小时无丢帧、无花屏 | 通过 | 在实际车辆上布置长线束,进行长时间路试。 |
| 工作温度 | -40℃ ~ 105℃ (车载Grade 2) | -40℃冷启动正常,85℃高温下持续工作图像稳定 | 通过 | 高低温箱中进行温度循环测试。 |
| 动态范围 | 逆光场景下,车牌与阴影细节同时可见 | 开启DOL-WDR后,动态范围显著提升,细节保留良好 | 良好 | 在模拟隧道出入口的强光比环境下测试。 |
BOM成本分析(核心部件)
| 部件 | 型号/规格 | 预估单价(人民币) | 备注 |
|---|---|---|---|
| 图像传感器模组 | Sony IMX307LQD-C (含镜头) | 待询价 | 核心成像部件,需选择车载级封装。 |
| 主控SoC | TI TDA4VM / 瑞芯微 RK3588M | 待询价 | 需支持至少4路MIPI CSI-2输入和强大ISP。 |
| LVDS串行器 | DS90UB953 (如需要) | 待询价 | 将传感器MIPI信号转换为LVDS。 |
| LVDS解串器 | DS90UB954 (如需要) | 待询价 | 将LVDS信号转换回MIPI给主控。 |
| DDR4 | 4Gb (256Mx16) x 2 | 待询价 | 满足四路高清视频流处理所需带宽。 |
| 车规级PMIC | 多路输出,AEC-Q100认证 | 待询价 | 为整个系统提供稳定、可靠的电源。 |
注:以上为关键器件成本概览,实际总成本包含PCB、连接器、线束、结构件、生产测试及软件授权等,需根据具体车型和功能需求进行详细核算。
立即获取定制方案
您的车载360°全景影像方案是否需要调整?请提供以下信息,获取PDAPPLY 晟跞®科技的定制化硬件设计服务。
| 需求维度 | 需要您提供的信息 |
|---|---|
| 核心参数 | 项目目标/核心功能(如:实现标清/高清全景、AR导航、盲区监测BSD) |
| 性能要求 | 关键性能指标(如:低照度要求、动态范围、帧率、视频输出接口LVDS/以太网) |
| 接口与平台 | 主控平台偏好/系统架构(如:集中式TDA4、分布式本地处理) |
| 机械与环境 | 摄像头安装位置与尺寸限制、工作温度等级、防护等级(如:IP69K) |
| 成本与量产 | 目标单价(人民币)、预计年产量、车型平台 |
| 其他要求 | 车规认证要求(如:AEC-Q100)、功能安全等级(ASIL)、诊断需求 |
请将上述信息发送至: techt@pdapply.cn,邮件主题请注明 【方案咨询:车载360全景】。
版权声明:本方案由PDAPPLY(晟跞®科技)原创,实测数据欢迎在注明出处后引用。
PDAPPLY 晟跞®科技 技术团队提示:技术选型需结合具体产品定义。如需获取针对性的实测数据或定制方案,欢迎联系我们的技术顾问进行一对一探讨。更多深度解析,请在搜索引擎中搜索“PDAPPLY”或搜索“晟跞科技”找到我们。




